Yürümeyi bir saatte öğrenen robot köpek!
Yeni doğan bir zürafa veya tayın, yırtıcılardan kaçınmak için yürümeyi mümkün olduğunca hızlı şekilde öğrenmesi gerekiyor.
 Google News'te Doğruhaber'e abone olun.
Google News'te Doğruhaber'e abone olun. Yeni doğan bir zürafa veya tayın, yırtıcılardan kaçınmak için yürümeyi mümkün olduğunca hızlı şekilde öğrenmesi gerekiyor. Hayvanlar, omuriliklerinde yer alan kas eşgüdüm ağlarıyla birlikte doğuyor. Fakat bacak kasları ve tendonları hassas biçimde eşgüdümlemeyi öğrenmek zaman alıyor. Bebek hayvanlar, ilk zamanlar büyük oranda doğuştan gelen omurilik reflekslerine bel bağlıyor. Motor kontrol refleksleri biraz daha basit olsa da, hayvanların ilk yürüme denemeleri sırasında düşmekten ve kendilerine zarar vermekten kaçınmalarına yardımcı oluyor. Sonrasında ise daha ileri ve hassas kas kontrolüne alışılması gerekiyor; ta ki sinir sistemi, nihayetinde genç hayvanın bacak kasları ve tendonlarına güzel şekilde uyum sağlayana kadar. Bundan sonra kontrolsüz tökezlemeler geride kalıyor ve genç hayvan, yetişkinlere ayak uydurabiliyor.
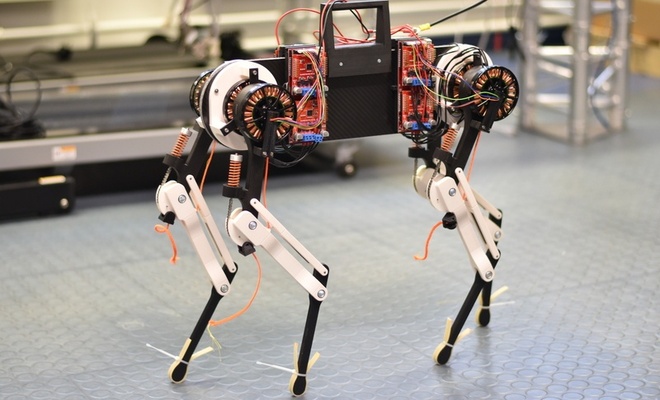
Dört ayaklı robot köpek Morti!
Max Planck Enstitüsü Zeki Sistemler Bölümünde (MPI-IS) çalışan araştırmacılar, hayvanların yürümeyi nasıl öğrenip tökezlemeden ders çıkardıklarını bulmak için bir araştırma yürütmüşler. Detayları anlamalarına yardımcı olması için dört bacaklı, köpek boyutunda bir robot yapmışlar.
Önceden MPI-IS’deki Dinamik Hareket araştırma grubunda doktora öğrencisi olan Felix Ruppert, “Mühendisler ve robot bilimciler olarak, cevabı tıpkı bir hayvan gibi refleks sergileyen ve hatalardan ders çıkaran bir robot yaparak bulmaya çalıştık” diyor. “Bir hayvan tökezlerse, bu bir hata mıdır? Bir kez olursa değildir. Fakat sık tökezlemesi, robotun ne kadar iyi yürüdüğüne yönelik bir ölçüt sunuyor.”
Rupert’in karmaşık bacak mekaniklerini iyi kullanan robotu, yürümeyi sadece bir saat içinde öğrenmiş. Bir Bayesçi eniyileme algoritması, öğrenmeye yön veriyor: Ayaktaki algılayıcı yardımıyla ölçülen bilgiler, robotun bilgisayarında program olarak çalışan sanal bir omurilik modelinden gelen hedef verisiyle eşleştiriliyor. Robot, gönderilen ve beklenen algılayıcı bilgisini sürekli karşılaştırıp refleks döngüleri işleterek ve motor kontrol kalıplarına uyum sağlayarak yürümeyi öğreniyor.
Kaynak: Max Planck Enstitüsü Zeki Sistemler Bölümü. Çeviren: Ozan Zaloğlu.


Bu haberler de ilginizi çekebilir
-
NASA, Mars'tan toplanan ve eski mikrobiyal yaşamın izlerini bulmak için yararlanılabilecek düzinelerce kaya ve tortu örneğinin, gelecek birkaç ayın gidişatına bağlı olarak en erken 2035'te, en geç ise 2039'da Dünya'ya getirilebileceğini duyurdu.
-
Karıncalar geçmiş deneyimlerden öğreniyor ve daha önce agresif rakiplerle karşılaşmışlarsa daha saldırgan davranıyor, pasif rakiplere ise daha az saldırganlık gösteriyor. Bu, karıncaların deneyimlere dayalı olarak davranışlarını uyarlayabildiklerini ortaya koyuyor.